Skip to content
헤리티지조 발표 주제는 “ 아두이노 자율주행 자동차 “ 입니다.
목차로는 이와 같이 구성되어 있습니다.
자율주행기술에 대한 중요도는 증가하고 있는 추세이며
이에 따라 아두이노와 라즈베리파이를 활용한 자율주행자동차에 대해 제작을 시작하였습니다.

설계방향 첫번째 ,모터 구동입니다.기본 원리는 아두이노로부터 명령 받은
L298N DC모터드라이버가 DC모터를 제어하는 원리이며
아두이노보드 , L298N DC모터 드라이버 , DC모터는 모터 구동의 큰 축을 담당하고 있습니다.
이러한 구조가 자동차의 구동 및 제어 구성 요소를 담당합니다,

설계방향 두번째, 라즈베리파이는’ 중앙 처리 장치 ’이며
카메라로부터 받은 영상정보를 분석하여명령 및 제어 역할을 담당하고 있습니다.

제작 과정 첫번째, 아두이노 각 모듈을 조립하여 아두이노 자동차 차체를 제작하였으며,
아두이노 보드, L298N DC모터 드라이버가 장착되어
아두이노 부품에 대해 명령 및 제어를 하고 있으며,
18650 배터리 2000mAH를 장착하여모터의 출력을 원할하게 하도록 돕습니다.

제작 과정 두번째, 라즈베리파이를 활용한 것입니다
라즈베리파이 OpenCV 라이브러리를 활용해 영상 처리를 하기 위해
라즈베리파이 보드를 사용하였고, 영상 수집을 위하여 라즈베리파이 카메라 모듈을 사용한 것이 특징입니다.

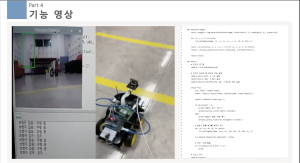
기능영상 첫번째, 차선인식 입니다. 가우시안 블러를 사용해 화면처리를 매끄럽게 하였고 ,
Canny 엣지 검출 ,Hough변환을 통해선의 특징들을 찾아 차선을 감지하고 있는 모습입니다.
차선 인식 정확도를 높이기 위해 차선인식 색상 범위를 지정해주어 노란색,흰색 선들만
차선으로 인식을 하고 정확도를 높이는 방법도 한가지 예시 입니다.
기능영상 두번째, 보행자 감지 입니다. 보행자 감지하기 위해 OpenCV의 HOG 디스크립터를 사용합니다.
입력한 함수로 보행자를 감지하고, 감지된 영역에 선을 그립니다.
보행자가 감지되면 정지를 출력해 아두이노로 정지 명령을 내리며,
보행자가 없음이 판단되면 아두이노로 출발 명령을 내리고 출발합니다.
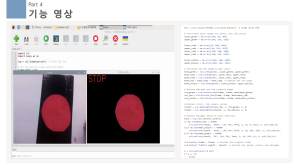
기능영상 세번째, 색상 인식 입니다. 실제 신호등 체계와 일치하도록 제작을 하였으며,
카메라로부터 실시간 프레임을 읽어와 감지된 특정 색상의 물체에 따라 교통 신호를 인식합니다.
HSV 색상 공간으로 변환한 후, 녹색, 빨간색,노란색의 색상 범위를 정의하고, 각각에 해당하는 마스크를 생성합니다.
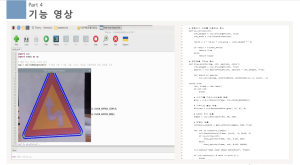
기능영상 네번째, 표지판 감지입니다. 표지판 각 특징에 따라 인식을 할 수 있도록 제작을 하였습니다.
실시간으로 프레임을 읽어와서 간단한 형태의 컨투어를 찾고,
원인지 다각형인지 판별하여 표지판을 인식하는 예제입니다.
다양한 표지판과 표지판 인식 정확도를 높일 수 있는 방법의 예로 딥러닝 학습 등이 있습니다.
참고자료로 “ RISS , Dbpia ” 논문 자료를 참고하였으며 ,
공대 관련 커뮤니티 사이트 “ hackster.io ” 사이트 자료 참고,
일부 GitHub 코드 자료를 활용했습니다.

-마무리 인사-